
මයික්රෝකොන්ට්රෝලර යොදාගෙන මෝටර පාලනය කිරීම - 4

විදුලි මෝටර ගත්කල ප්රධාන වශයෙන් වර්ග තුනකට වෙන්කර දක්වන ලදී. AC මෝටර, DC මෝටර හා විශේෂ කාර්ය සදහා නිර්මාණය කර ඇති මෝටර එම වර්ග තුන වේ. ඒ අනුව Stepper motor, servo motor, universal motor යනු වැඩි වශයෙන් යොදාගනු ලබන විශේෂ කාර්ය සදහා නිර්මාණය කර ඇති මෝටර වර්ග වේ.
මෙම විශේෂ කාර්ය සදහා නිර්මාණය කර ඇති මෝටරවල ක්රියාකාරිත්වය ද පෙරදී විස්තර කරන ලද AC හා DC මෝටරවල මෙන් විද්යුත් චුම්භක ප්රේරණයේ මූලධර්මය මත ක්රියා කරයි.එහෙත් මෙම ප්රේරණ මූලධර්මය යොදාගන්නා ආකාරය පෙර දී විස්තර කරන ලද මෝටර ක්රියාකාරිත්වයට වඩා වෙනස් ආකාරයකට සිදු වේ.
මෙම විශේෂ කාර්ය මෝටර නිර්මාණය කර ඇත්තේ යම් විශේෂිත කාර්යක් ඉටුකර ගැනීම සදහා වේ.උදාහරනයක් ලෙස Stepper motor නිර්මාණය කර ඇත්තේ එක් කාර්යක් කර ගැනීමට වන අතර servo motor නිර්මාණය කර ඇත්තේ තවත් කාර්යක් ඉටුකර ගැනීම සදහා වේ.ඒ අනුව මෙම මෝටරවල ක්රියාකාරිත්වය ද නිර්මාණය කරනු ලබන එක් එක් විශේෂ කාර්ය මෝටර වර්ගය අනුව වෙනස් වේ.
Stepper motor
රොබෝ තාක්ෂණය,ස්වයංක්රීය පද්ධතිවල,සමහර සෙල්ලම් බඩු වැනි යෙදවුම් වල සහ ඉලෙක්ට්රෝණික තාක්ෂනයේ බොහෝ යෙදවුම් වල ස්ටෙපර් මෝටරය භාවිතා කරයි.මම Stepper මෝටර ද DC විදුලියෙන් ක්රියාත්මක වේ.එහෙත් මෙම මෝටරවල විශේෂත්වය වන්නේ සාමාන්ය DC මෝටර වල මෙන් නොව මෙහි භ්රමණය පියවරෙන් පියවර (Step by Step) සිදු වීමයි.එමනිසා මෙම මෝටර යොදාගනු ලබන්නේ සාමාන්ය මෝටර යොදාගනු ලබන කාර්යන්ට වඩා වෙනස් කාර්යන් සිදුකර ගැනීම සදහා වේ.
සාමාන්යය DC මෝටර වල නම් ,එහි අග්ර
දෙකට විදුලිය ලබාදුන් විට භ්රමණය සිදුකර ගත හැක.එහෙත් මෙම මෝටර වල භ්රමණය
සිදුකර ගැනීම සදහා වයර සම්බන්දතා කිහිපයක් පවතී.ඒ අනුව මෙම මෝටරයක සම්පූර්න භ්රමණය සිදුකර ගැනීම සදහා
එහි ඇති වයර සම්බන්දතා කිහිපයම යොදාගෙන යම් ක්රමවත් ආකාරයකට විදුලිය ලබාදිය
යුතුය.

තවද මෙම මෝටරවල ඇති විශේෂත්වය වන්නේ මෙම පියවර ගණන අපට අවශ්යය ආකාරයට පාලනය කරමින් මෝටරයේ නිශ්චිත පිහිටීම පාලනය කළ හැකි වීමයි.ඒ අනුව මෙම මෝටරවල පියවර සිදුවන ආකාරය පහත දැක්වෙන් ආකාරයට පැහැදිලි කර ගත හැක.
මෙම මෝටරවල සම්පූර්ණ භ්රමණය සමාන පියවර ගණනකට බෙදා ගනු ලබයි. උදාහරණයක් ලෙස එක් මෝටරයක භ්රමණය සමාන පියවර 200 කින් සිදුවන්නේ යැයි සිතමු.එවිට මෝටරයක සම්පූර්ණ භ්රමණය වන අංශක 360 ° සිදුවන්නේ එක් පිවරක් අංශක බැගින් පියවර දෙසියකින් වේ.ඒ අනුව මෙම මෝටරයේ එක් පියවරක් 1.8° වේ.මෙම මොටරය මගින් 90°කෝණික විස්ථාපණයක් සිදු කරගැනීම සදහා පියවර 50 සිදුකරගත යුතුය.
මේ ආකාරයට පියවර 180, 144, 72, 24 සහ 12 බැගින් සම්පූර්ණ භ්රමණය සිදු වන්නේ නම්, ඒවායේ එක් එක් පියවර (step) පිළිවෙලින් 2 °, 2.5 °, 5 °, 15 ° සහ කෝණ වලින් සිදු වේ.
මෙම කරුනු අනුව මෙම මෝටර වලට Stepper මෝටර යනුවෙන් හදුන්වන්නේ ඇයි දැයි දැන් පැහැදිලි විය යුතුය.
Stepper මෝටරවල ක්රියාකාරිත්වය
Stepper මෝටර ද සකස් වී ඇති ආකාරය ගත් කල පෙරදී විස්තර කරන ලද සාමාන්ය විදුලි මෝටර මෙන් එය ද ස්ටේටරයකින් සහ රෝටර් එකකින් නිර්මාණ වී ඇත.

රෝටර් යනු චලනය වන කොටස වන අතර එය සාමාන්ය මෝටරවල ආමිචරයට(amacher) වඩා වෙනස් ආකාරයකට නිර්මාණය කර ඇත.ඒ අනුව රෝටරය ප්රධාන වශයෙන් කොටස් තුනකින් සමන්විත වේ.එනම් රෝටර් 1, රෝටර් 2 සහ ස්ථිර චුම්බකය එම කොටස් වේ. මෙම කොටස් මගින් රෝටරය නිර්මාණය කරනු ලබන්නේ එක් රෝටරයක් උතුරට ධ්රැවීකරණය වන ලෙස හා අනෙක් රෝටරය දකුණට ධ්රැවීකරනය වන ලෙසට වේ.

ඒ අනුව සමස්ථයක් ලෙස ගත්කල රෝටරයේ දැති උත්තරධ්රැවය හා දක්ෂිනත් ධ්රැවය මාරුවෙන් මාරුවට පිහිටන ආකාරයෙන් පිහිටනු ලබයි.

එසේම, සාමාන්යය මෝටර වල නම් ස්ටේටරය ස්ථාවර චුම්බක දෙකින් හෝ කොයිල් දගර දෙකක් යොදාගෙන ධ්රැව දෙක නිර්මාණය කරගනු ලබයි.ඒ අනුව එහි ඇත්තේ වයර සම්බන්දතා දෙකක් පමණි.එහෙත් Stepper මෝටර වල ස්ටේටරය කොයිල් දඟර තුනකින්,හතරකින් හෝ බහු කොයිල් දඟර යොදාගෙන ධ්රැව දෙකක්, තුනක් හෝ හතරක් යොදාගෙන බහු ධ්රැව ප්රමාණයක් ඇතිවන ආකාරයෙන් නිර්මාණය කරගනු ලබයි.

Stepper මෝටරවල ක්රියාකාරිත්වය ද සිදු වන්නේ විද්යුත් චුම්භක ප්රේරණ මූලධර්මය මත වන නමුත් එය පෙරදී විස්තරකරන ලද සාමාන්යය AC හා DC මෝටරවල ක්රියාකාරිත්වයට වඩා වෙනස් ආකාරයකින් වේ.
සාමාන්යය මෝටරවල නම් එහි අග්රමතට විදුලිය අඛණ්ඩව ලබා දුන් විට චුම්බක ක්ෂත්රයක් ඇති වී රෝටරය මත බල යුක්මයක් ඇති වී එය භ්රමණය වේ.එහෙත් Stepper මෝටරවල සිදු වන්නේ ස්ටේටරයේ කොයිල් දගර මගින් ඇතිවන චුම්බක ක්ෂත්රයේ ධ්රැව හා රෝටරයේ චුම්බකය නිසා ඇතිවන ධ්රැව අන්තර් ක්රියාකාරිත්වය හේතු කරගෙන ධ්රැව ආකර්ෂණය වීම මත භ්රමණය සිදුවීමයි.
ඒ අනුව Stepper මෝටරවල ක්රියාකාරිත්වය සිදුවීම සදහා කොයිල් දගර මත අඛණ්ඩව විදුලිය ලබා දීමක් සිදු නොකරන අතර එම එක් එක් දගර මත මාරුවෙන් මැරුවට විදුලිය ලබා දීම මගින් එම ධ්රැව මතට රොටරය ආකර්ෂණය කිරීම මගින් භ්රමණය සිදු කරනු ලබයි.
පහත රූපයේ දක්වා ඇත්තේ Stepper මෝටරයේ භ්රමණය සිදුවන ආකාරයේ දළ ආකාරයයි.මෙහිදී රෝටරයේ එක් දැත්තක භ්රමණය පමණක් සලකා බලනු ලබයි.

පළමුවෙන්ම ස්ටේටරයේ එක් කොයිලයක් වෙත විදුලිය ලබා දුන් විට එය විද්යුත් චුම්භකයක් ලෙස සකස් වේ.දැන් ස්ටේටරයේ විද්යුත් චුම්භකය රෝටරයේ දැත්ත හා ප්රතිවිරුද්ධ ලෙස ද්රැවීකරණය වේ.එම නිසා රෝටරයේ දැත්ත විද්යුත් චුම්භකය වෙත ආකර්ෂණය වේ. ඉන්පසු මෙම පළමු විද්යුත් චුම්භකය අක්රීය කර ඊළඟ කොයිල වෙත විදුලිය ලබා දී එම විද්යුත් චුම්භකය සක්රීය කරගත් විට, රෝටරයේ දැත්ත එම චුම්භකය වෙත ආකාර්ෂණය වේ.මේ ආකාරයට කොයිල වෙතට මාරුවෙන් මාරුවට විදුලිය ලබා දීම මගින් විද්යුත් චුම්භකය වෙත රොටරයේ දැත්ත ආකර්ෂණය වීම අනුව භ්රමණය සිදු වේ.මෙම කරුනු අනුව පෙනෙන කාරනය නම් Stepper මෝටරයේ එක් සම්පූර්ණ භ්රමණය සඳහා ස්ටේටරයේ කොයිල මතට විද්යුත් ස්පන්දන අනුක්රමයක් අවශ්ය වන බවයි.
Stepper Motor වර්ග
අදවන විට විවිධ අවශ්යතා අනුව Stepper මෝටර විශාල ප්රමාණයක් නිර්මාණය කරනු දක්නට ලැබෙයි.මෙලෙස Stepper මෝටර වර්ග විශාල ප්රමාණයක් නිර්මාණය කරනු ලැබුවද මේ සෑම Stepper මෝටරයක්ම ප්රධාන වශයෙන් ආකාර දෙකකට නිර්මාණය කරනු ලබයි. එනම් රෝටරය නිර්මාණය කරන ආකාරය හා ස්ටේටරය නිර්මාණය කරන ආකාරය අනුව වේ.
පහත දැක්වෙන්නේ මෙම ආකාර දෙකට නිර්මාණය කරනු ලබන ප්රධාන Stepper මෝටර වර්ග වේ.
රෝටරය නිර්මාණය කරනු ලබන ආකාරය අනුව නිර්මාණය කරනු ලබන මෝටර වර්ග
2.Variable Reluctance Stepper
3.Hybrid Stepper
ස්ටේටරයේ කොයිල නිර්මාණය කරනු ලබන ආකාරය අනුව නිර්මාණය කරනු ලබන මෝටර වර්ග
2.Bipolar Motors
මෙලෙස කුමණ ආකාරයකට Stepper මෝටර වර්ග නිර්මාණය කරනු ලැබුව ද,මෝටර ප්රයෝගිකව යොදාගැනීම සදහා ක්රියාත්මක කිරීමේදී අපට අවශ්ය වන්නේ ස්ටේටරයේ කොයිල සකස්කර ඇති ආකාරය වේ.එම නිසා සාමාන්යයෙන් ප්රධාන Stepper මෝටර වර්ග ලෙස සලකනු ලබන්නේ Unipolar Motors හා Bipolar Motors වේ.
Unipolar Motors
මෙම මෝටරවල කොයිලය නිර්මාණය කර ඇත්තේ center tap වන ආකාරයට වේ.එම නිසා මෙම මෝටරයක පහත දැක්වෙන ආකාරයට වයර සම්බන්දතා පහක් පවතී.

එසේම මෙම කොයිල සම්බන්දතා වෙන වෙනම පවතින ආකාරයෙන්ද නිර්මාණය කරගනු ලබන අතර එවිට පහත දැක්වෙන ආකාරයට වයර සම්බන්දතා හයක් හෝ අටක් පවතින ලබයි.

මේ ආකාරයට කොයිලයේ center tap එකක් ඇති නිසා මෙම මොටර පාලනය කිරීම ඉතා පහසු වේ.එනම් center tap අග්රයට සැපයුම් විදුලියේ එක් අග්රයක් ලබා දෙනු ලබන අතර අනෙක් අග්රය ඉතිරි සම්බන්දතාවයන්ට ලබා දීම මගින් චලනය සිදු කරගත හැක.
Center tap එකක් තිබිමේ අනෙක් වාසිය වන්නේ, කොයිලය හරහා ගමන් කරන ධාරාවේ දිශාව වෙනස් කිරීමකින් තොරව කොයිලයේ අග්ර මාරුකිරීම මගින් කොයිලය හරහා ගමන් කරන ධාරාවේ දිශාව වෙනස් කල හැක.එමගින් මෝටරයේ භ්රමණ දිශාව පහසුවෙන් වෙනස් කිරීම සිදු කරගත හැක.
මෙහිදී කොයිලයේ අග්ර වෙනස් කිරීම මගින් කොයිලය හරහා ගමන් කරන ධාරාවේ දිශාව වෙනස් උවද කොයිලය මත සැපයුම් අග්රවල දිශාව වෙනස් කිරීමක් සිදු නොවන බැවින් සෑමවිටම කොයිල මත ඇති වන්නේ එක් වර්ගයක චුම්බක ධ්රැවයන් පමණි.මෙම මෝටර ඒක ධ්රැවිය (Unipolar) මෝටර ලෙස හදුන්වන්නේද මේ නිසා වේ.
Stepping Modes
Stepper මෝටරවල සම්පූර්ණ භ්රමණය පියවර ගණනකට (step) අනුව සිදු වේ.මෙම step එකක් සිදුවන ආකාරය කොයිල මත ඇති කරන චුම්භකත්වය අනුව වෙනස් කරගත හැකිය. Stepping Modes ලෙස හදුන්වනු ලබන්නේ මෝටරයේ එක් step එකක් සිදුකරන ගැනීම සදහා කොයිල මත විද්යුත් චුම්භක ශක්තිය ඇති කරන ආකාරය වේ.
Unipolar Stepper මෝටර සඳහා ප්රධාන වශයෙන් ක්රම තුනකට Stepping Modes ඇති කරනු ලබයි.ඒ අනුව පහත දැක්වෙන්නේ බහුලව භාවිතා වන Stepping Modes ක්රම තුන වේ.
1. Wave Drive
2. Full Drive
3. Half Drive
Wave Drive - මෙම ක්රමයේදී ස්ටේටරයේ එක් කොයිලයක් පමණක් වරකට විද්යුත් චුම්භකයක් බවට පත්කරනු ලබයි.

Full Drive - මෙම ක්රමයේදී එක විට කොයිල දෙකක් විද්යුත් චුම්භකත්වයට පත්කරනු ලබයි. සාමාන්යයෙන්
Stepper මෝටර යොදාගනු ලබන්නේ මෙම ක්රමයට වේ.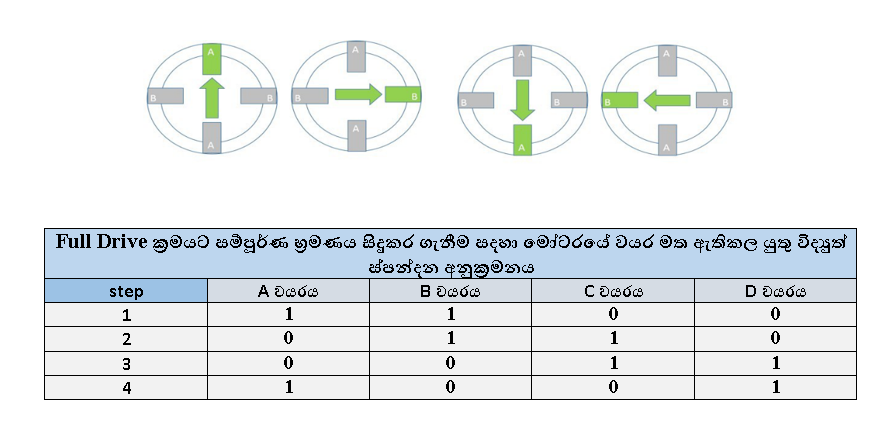
Half Drive - මෙම ක්රමයේදී ස්ටේටරයේ කොයිල එකක් හෝ දෙකක් එක විට විද්යුත් චුම්භකත්වයට
පත්කරනු ලබයි.
Bipolar Motors
මෙම මෝටරයට පෙර සදහන් කල Unipolar මෝටරය මෙන් කේන්ද්රීය ටැප් සම්බන්ධතාවක් නොමැත.එබැවින් මෙහි කොයිල සම්බන්දතාවය Unipolar මෝටරයට වඩා සරල වේ.එනම් සමාන ප්රතිරෝධ ඇති කොයිල දෙකකින් මෙය සමන්විත වේ.ඒ අනුව මෙම මෝටර වල පහත රූපයේ දක්වා ඇති ආකාරයට වයර සම්බන්දතා හතර පවතී.

මෙම මෝටරය ධාවනය කිරීම සදහා ද මෙහි සැපයුම් අග්රවලට යම් ක්රම වේදයකට අනුව විද්යුත් ස්පන්දන අනුක්රමනය ලබා දීම සිදුකල යුතුය.ඒ අනුව පහත දැක්වෙන්නේ Bipolar මෝටරය සම්පූර්න වටයක් චලනය කරගැනීම සදහා වයර මත ඇති කල යුතු විද්යුත් ස්පන්දන රටාව වේ.

Unipolar මෝටර වල නම්, විදුලි සැපයුමේ අග්ර මාරු කිරීමකින් තොරව මෝටරය දෙදිශාවටම වලනය කර ගැනීමට හැකි විය.එහෙත් Bipolar මෝටරය යම් දිශාවකට වලනය කිරීම සදහා එහි එක් කොයිලයක් මතට විදුලි සැපයුම ලබා දිය යුතුය.දැන් නැවත ඊට විරුද්ධ දිශාවට මෝටරය චලනය කිරීම සදහා එම කොයිලය හරහා ගමන් කරන ධාරාවේ දිශාව වෙනස්කල යුතුය. ඒ සදහා කොයිල මත සැපයුම් අග්ර මාරුකල යුතුය.එවිට කොයිල මත ධ්රැවීයතාවය වෙනස් වී පෙර චලනය වූ දිශාවට විරුද්ධව මෝටරයේ චලන සිදු වේ.
මෙහිදී කොයිලයේ සැපයුම් අග්ර වෙනස් කිරීම නිසා කොයිලය හරහා ගමන් කරන ධාරාවේ දිශාව වෙනස් වේ.මෙහිදී කොයිල හරහා එක් දිශාවකට ධාරාව ගමන් කරන විට කොයිලය මත එක් චුම්බක ධ්රැවයක් ද අනෙක් දිශාවට ධාරාව ගමන් කරන විට අනෙක් චුම්භක ධ්රැවය ද ඇති වේ. මේ ආකාරයට එක් කොයිලය මත චුම්භක ධ්රැවයන් දෙකම ඇතිවන නිසා මෙම මෝටර ද්වි ධ්රැවිය (Bipolar) මෝටර ලෙස හදුන්වනු ලබයි.
PIC 16F877A මයික්රෝකොන්ට්රෝලරය යොදාගෙන Unipolar Stepper මෝටරයක් ධාවනය කිරීම
පහත දැක්වෙන්නේ Unipolar Stepper මෝටරය ධාවනය කිරීමට අදාල පරිපථ සටහන වේ.

Unipolar Stepper මෝටර වල Stepping Modes තුනක් ඇති බැවින් මෙම Mode තුනටම මෝටරය ධාවනය කරන ආකාරය සලකා බැලිය යුතුය.
1. Wave Drive


2. Full Drive


3. Half Drive


PIC 16F877A මයික්රෝකොන්ට්රෝලරය යොදාගෙන Bipolar Stepper මෝටරයක් ධාවනය කිරීම

